Inflatable Haptic Sensor for the Torso of a Hugging Robot
2019
Miscellaneous
hi
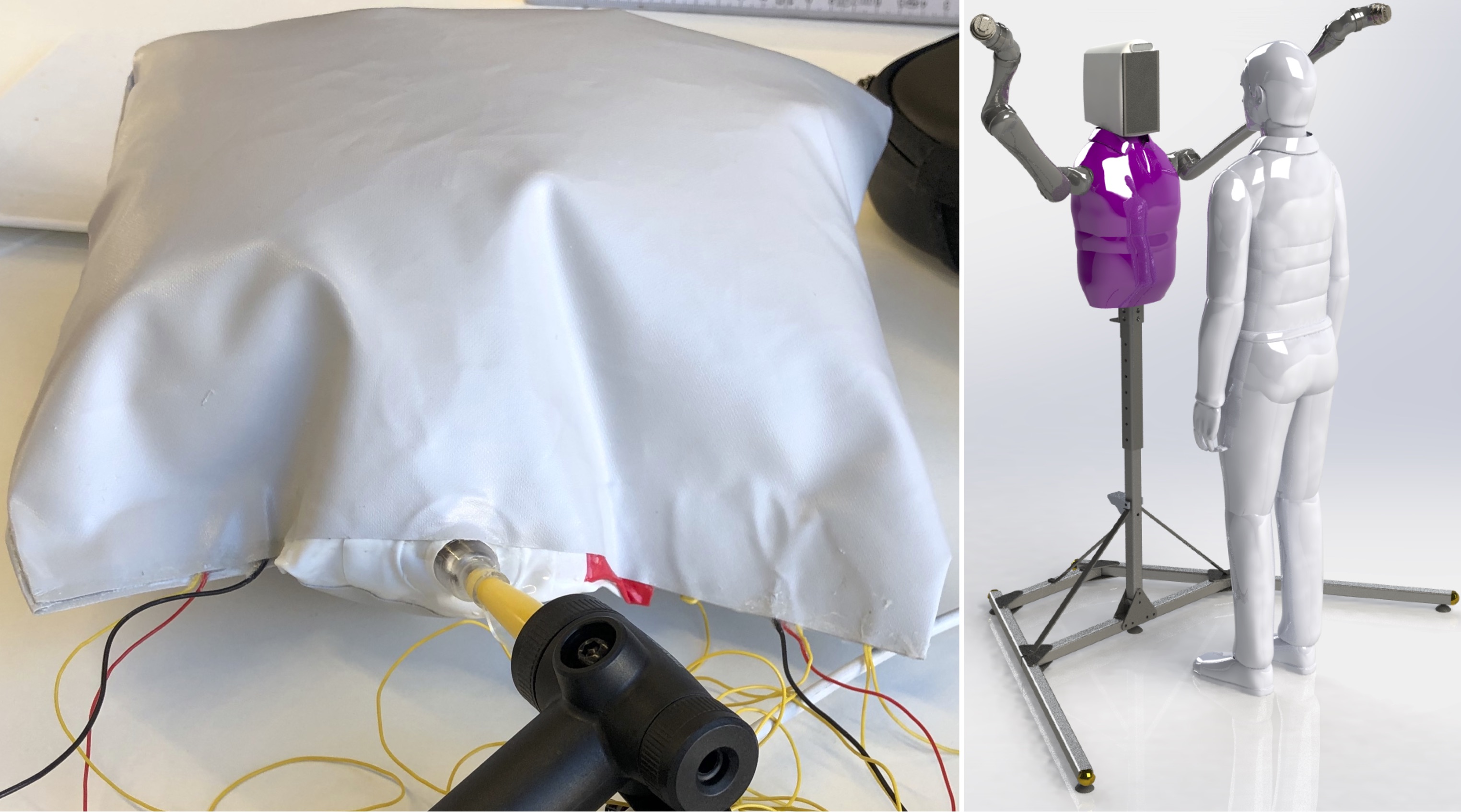
During hugs, humans naturally provide and intuit subtle non-verbal cues that signify the strength and duration of an exchanged hug. Personal preferences for this close interaction may vary greatly between people; robots do not currently have the abilities to perceive or understand these preferences. This work-in-progress paper discusses designing, building, and testing a novel inflatable torso that can simultaneously soften a robot and act as a tactile sensor to enable more natural and responsive hugging. Using PVC vinyl, a microphone, and a barometric pressure sensor, we created a small test chamber to demonstrate a proof of concept for the full torso. While contacting the chamber in several ways common in hugs (pat, squeeze, scratch, and rub), we recorded data from the two sensors. The preliminary results suggest that the complementary haptic sensing channels allow us to detect coarse and fine contacts typically experienced during hugs, regardless of user hand placement.
| Author(s): | Alexis E. Block and Katherine J. Kuchenbecker |
| Year: | 2019 |
| Month: | July |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Fabrication of HuggieBot 2.0: A More Huggable Robot
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Work in Progress |
| Address: | Tokyo, Japan |
| How Published: | Work-in-progress paper (2 pages) presented at the IEEE World Haptics Conference (WHC) |
| State: | Published |
|
BibTex @misc{Block19-WHCWIP-Inflatable,
title = {Inflatable Haptic Sensor for the Torso of a Hugging Robot},
author = {Block, Alexis E. and Kuchenbecker, Katherine J.},
howpublished = {Work-in-progress paper (2 pages) presented at the IEEE World Haptics Conference (WHC)},
address = {Tokyo, Japan},
month = jul,
year = {2019},
doi = {},
month_numeric = {7}
}
|
|